LỆNH SINA_POS TRONG S7 200 SMART
Th5
Lệnh SINA_POS có thể điều khiển và thiết lập vị trí cho các bộ truyền động.
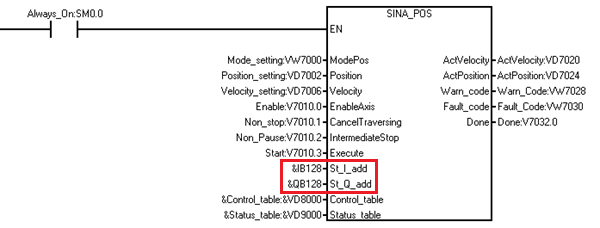
Bạn có thể chèn một lệnh SINA_POS như sau:
Các tham số của lệnh SINA_POS
| Parameter and type | Định dạng | Miêu tả | |
| ModePos | IN | INT | Chế độ hoạt động: |
| 1 = định vị tương đối | |||
| 2 = định vị tuyệt đối | |||
| 3 = định vị khi thiết lập | |||
| 4 = tham khảo (hoạt động dẫn đường) | |||
| 5 = tham chiếu (đặt điểm tham chiếu) | |||
| 6 = khối ngang 0 – 15 | |||
| 7 = chế độ chạy bộ | |||
| 8 = chạy bộ tăng dần | |||
| Position | IN | DINT | Định vị điểm thiết lập trong [LU] cho đầu vào điểm thiết lập trực tiếp / chế độ MDI hoặc số khối di chuyển ngang cho chế độ khối di chuyển ngang. (Mặc định = 0) |
| Velocity | IN | DINT | Vận tốc tính bằng [LU/min] cho chế độ MDI. |
| (Giá trị mặc định = 0 [1000LU/phút]) | |||
| EnableAxis | IN | BOOL | Lệnh chuyển đổi: 0 = TẮT, 1 = BẬT |
| CancelTraversing | IN | BOOL | 0 = từ chối tác vụ di chuyển ngang đang hoạt động |
| 1 = không từ chối (Mặc định) | |||
| IntermediateStop | IN | BOOL | 0 = lệnh di chuyển ngang đang hoạt động bị gián đoạn |
| 1 = không có điểm dừng trung gian (Mặc định) | |||
| Execute | IN | BOOL | Kích hoạt nhiệm vụ di chuyển ngang/chấp nhận điểm thiết lập/kích hoạt chức năng tham chiếu. |
| St_I_add | IN | DWORD | Con trỏ của địa chỉ bắt đầu vùng nhớ I cho PROFINET IO. Ví dụ: &IB128. |
| St_Q_add | IN | DWORD | Con trỏ của địa chỉ bắt đầu vùng bộ nhớ Q cho PROFINET IO. Ví dụ: &QB128. |
| Control_table | IN | DWORD | Con trỏ địa chỉ bắt đầu của control_table. Ví dụ: &VD8000. |
| Status_table | IN | DWORD | Con trỏ địa chỉ bắt đầu của bảng Status_table. Ví dụ: &VD9000. |
| ActVelocity | OUT | DWORD | Vận tốc thực tế |
| ActPosition | OUT | DWORD | Vị trí thực tế tại LU |
| Warn_code | OUT | WORD | Thông tin mã cảnh báo từ V90. Để biết thông tin chi tiết, hãy tham khảo SINAMICS V90, Hướng dẫn vận hành SIMOTICS S-1FL6. |
| Fault_code | OUT | WORD | Thông tin mã lỗi từ V90. Để biết thông tin chi tiết, hãy tham khảo SINAMICS V90, Hướng dẫn vận hành SIMOTICS S-1FL6. |
| Done | OUT | BOOL | Vị trí mục tiêu đạt được khi chế độ vận hành là định vị tương đối hoặc định vị tuyệt đối. |
Mô tả đầu vào cấu hình “ConfigEPos”
| ConfigEpos | Telegram 111 | ConfigEpos | Telegram 111 |
| ConfigEPos.%X0 | STW1.%X1 | ConfigEPos.%X16 | STW1.%X15 |
| ConfigEPos.%X1 | STW1.%X2 | ConfigEPos.%X17 | EPosSTW1.%X6 |
| ConfigEPos.%X2 | EPosSTW2.%X14 | ConfigEPos.%X18 | EPosSTW1.%X7 |
| ConfigEPos.%X3 | EPosSTW2.%X15 | ConfigEPos.%X19 | EPosSTW1.%X11 |
| ConfigEPos.%X4 | EPosSTW2.%X11 | ConfigEPos.%X20 | EPosSTW1.%X13 |
| ConfigEPos.%X5 | EPosSTW2.%X10 | ConfigEPos.%X21 | EPosSTW2.%X3 |
| ConfigEPos.%X6 | EPosSTW2.%X2 | ConfigEPos.%X22 | EPosSTW2.%X4 |
| ConfigEPos.%X7 | STW1.%X13 | ConfigEPos.%X23 | EPosSTW2.%X6 |
| ConfigEPos.%X8 | EPosSTW1.%X12 | ConfigEPos.%X24 | EPosSTW2.%X7 |
| ConfigEPos.%X9 | STW2.%X0 | ConfigEPos.%X25 | EPosSTW2.%X12 |
| ConfigEPos.%X10 | STW2.%X1 | ConfigEPos.%X26 | EPosSTW2.%X13 |
| ConfigEPos.%X11 | STW2.%X2 | ConfigEPos.%X27 | STW2.%X5 |
| ConfigEPos.%X12 | STW2.%X3 | ConfigEPos.%X28 | STW2.%X6 |
| ConfigEPos.%X13 | STW2.%X4 | ConfigEPos.%X29 | STW2.%X8 |
| ConfigEPos.%X14 | STW2.%X7 | ConfigEPos.%X30 | STW2.%X9 |
| ConfigEPos.%X15 | STW1.%X14 |
Định nghĩa tham số “Control_table”
| Byte Offset | Bit7 | Bit6 | Bit5 | Bit4 | Bit3 | Bit2 | Bit1 | Bit0 |
| 0 | Reserved | Reserved | AckError 1 | FlyRef 2 | Jog2 3 | Jog1 4 | Negative 5 | Positive 6 |
| 1 | Reserved | |||||||
| 2 | OverV 7 | |||||||
| 3 | ||||||||
| 4 | OverAcc 8 | |||||||
| 5 | ||||||||
| 6 | OverDec 9 | |||||||
| 7 | ||||||||
| 8 | ConfigEpos 10 | |||||||
| 9 | ||||||||
| 10 | ||||||||
| 11 | ||||||||
Định nghĩa tham số “Status_table”
| Byte offset | Bit7 | Bit6 | Bit5 | Bit4 | Bit3 | Bit2 | Bit1 | Bit0 |
| 0 | Reserved | Overrange_Error 1 | AxisError 2 | AxisWarn 3 | Lockout 4 | AxisRef 5 | AxisPosOk 6 | Axisenabled 7 |
| 1 | Error ID 8 | |||||||
| 2 | Actmode 9 | |||||||
| 3 | ||||||||
| 4 | Epos_zsw1 10 | |||||||
| 5 | ||||||||
| 6 | Epos_zsw2 11 | |||||||
| 7 | ||||||||
1 Overrange_Error: Dữ liệu bạn nhập nằm ngoài phạm vi. Để biết thông tin chi tiết, hãy tham khảo Mã lỗi 3, 4, 5.
2 AxisError: Ổ đĩa có lỗi. (Mặc định = 0)
3 AxisWarn: Cảnh báo biến tần đang hoạt động. (Mặc định = 0)
4 Lockout: Ngăn chặn việc bật nguồn. (Mặc định = 0)
5 AxisRef: Tập hợp điểm tham chiếu. (Mặc định = 0)
6 AxisPosOk: Đạt đến vị trí mục tiêu của trục. (Mặc định = 0)
7 Axisenabled: Biến tần đã sẵn sàng và được bật. (Mặc định = 0)
8 Error ID: Xác định loại lỗi. Để biết thông tin chi tiết, hãy tham khảo Mã lỗi cho tham số “Bảng_trạng thái”.
9 Actmode: Chế độ hiện đang hoạt động. (Mặc định = 0)
10 Epos_zsw1: Trạng thái của EPos_zsw1 (dạng bit). Để biết thông tin chi tiết, hãy tham khảo Chuyển nhượng “Epos_zsw1”.(Mặc định = 0)
11 Epos_zsw2: Trạng thái của EPos_zsw2 (dạng bit). Để biết thông tin chi tiết, hãy tham khảo Chuyển nhượng “Epos_zsw2”.(Mặc định = 0)
Mã lỗi cho tham số “Status_table”
| Error Code | Sự miêu tả |
| 0 | Không có lỗi. |
| 1 | Một lỗi từ ổ đĩa được phát hiện. |
| 2 | Ổ đĩa bị vô hiệu hóa. |
| 3 | Chế độ đã chọn không được hỗ trợ. |
| 4 | Tỷ lệ các tham số OverV, OverAcc và OverDec vượt quá phạm vi giá trị được hỗ trợ. |
| 5 | Khối được chọn nằm ngoài phạm vi trong chế độ chuyển động “khối ngang”. |
Chuyển đổi “Epos_zsw1”
| Bit | Abbr. | Designation | Drive parameter | Function chart |
| 0 | ActTrvBit0 | Khối di chuyển ngang hoạt động, bit 0 | r2670.0 | 3650 |
| 1 | ActTrvBit1 | Khối di chuyển ngang hoạt động, bit 1 | r2670.1 | 3650 |
| 2 | ActTrvBit2 | Khối di chuyển ngang hoạt động, bit 2 | r2670.2 | 3650 |
| 3 | ActTrvBit3 | Khối di chuyển ngang hoạt động, bit 3 | r2670.3 | 3650 |
| 4 | ActTrvBit4 | Khối di chuyển ngang hoạt động, bit 4 | r2670.4 | 3650 |
| 5 | ActTrvBit5 | Khối di chuyển ngang hoạt động, bit 5 | r2670.5 | 3650 |
| 6 | Bit6 | Kín đáo | ||
| 7 | Bit7 | Kín đáo | ||
| 8 | StpCamMinAct | DỪNG cam trừ hoạt động | r2684.13 | 3630 |
| 9 | StpCamPlsAct | STOP cam cộng với hoạt động | r2684.14 | 3630 |
| 10 | JogAct | Chế độ chạy bộ đang hoạt động | r2094.0 1 | 2460 |
| 11 | RefAct | Chế độ tiếp cận điểm tham chiếu đang hoạt động | r2094.1 1 | 2460 |
| 12 | FlyRefAct | Đang hoạt động tham chiếu bay | r2684.1 1 | 3630 |
| 13 | TrvBlAct | Chế độ khối di chuyển ngang đang hoạt động | r2094.2 1 | 2460 |
| 14 | MdiStupAct | Ở chế độ đầu vào điểm đặt trực tiếp / MDI, thiết lập đang hoạt động | r2094.4 1 | 2460 |
| 15 | MdiPosAct | Ở chế độ đầu vào điểm đặt trực tiếp / MDI, định vị được kích hoạt | r2094.3 1 | 2460 |
Chuyển đổi “Epos_zsw2”
| Bit | Abbr. | Designation | Drive parameter | Function chart |
| 0 | TrkModeAct | Chế độ theo dõi/theo dõi đang hoạt động | r2683.0 | 3645 |
| 1 | VeloLimAct | Giới hạn vận tốc đang hoạt động | r2683.1 | 3645 |
| 2 | SetPStat | Điểm đặt tĩnh | r2683.2 | 3645 |
| 3 | PrntMrkOut | Dấu in bên ngoài cửa sổ bên ngoài | r2683.3 | 3614 |
| 4 | FWD | Trục di chuyển về phía trước | r2683.4 | 3635 |
| 5 | BWD | Trục di chuyển lùi | r2683.5 | 3635 |
| 6 | SftSwMinAct | Công tắc giới hạn phần mềm trừ được kích hoạt | r2683.6 | 3635 |
| 7 | SftSwPlsAct | Công tắc giới hạn phần mềm Plus được kích hoạt | r2683.7 | 3635 |
| 8 | PosSmCam1 | Giá trị thực tế vị trí <= chuyển đổi vị trí cam 1 | r2683.8 | 4025 |
| 9 | PosSmCam2 | Giá trị thực tế vị trí <= chuyển đổi vị trí cam 2 | r2683.9 | 4025 |
| 10 | TrvOut1 | Đầu ra trực tiếp 1 với khối di chuyển ngang | r2683.10 | 3616 |
| 11 | TrvOut2 | Đầu ra trực tiếp 2 với khối di chuyển ngang | r2683.11 | 3616 |
| 12 | FxStpRd | Đã đạt đến điểm dừng cố định | <not used> (r2683.12) | 3645 |
| 13 | FxStpTrRd | Đã đạt đến mômen kẹp dừng cố định | <not used> (r2683.13) | 3645 |
| 14 | TrvFxStpAct | Đi tới điểm cố định dừng hoạt động | <not used> (r2683.14) | 3645 |
| 15 | CmdAct | Di chuyển ngang đang hoạt động | r2683.15 | 3645 |
Lựa chọn chế độ của SINAMICS với lệnh SINA_POS
Đầu vào “ModePos” được sử dụng để chọn chế độ vận hành. Có tám chế độ hoạt động:
Định vị tương đối
Định vị tuyệt đối
Chế độ cài đặt
Tham chiếu (tham chiếu tích cực)
Tham chiếu (đặt điểm tham chiếu)
Khối di chuyển ngang
chạy bộ
Chạy bộ tăng dần
Những yêu cầu cơ bản
Bài viết cùng chủ đề:
-

SAMSUNG S25 ULTRA VÀ CÁC TÍNH NĂNG DỰ ĐOÁN
-
CÁC ĐIỂM CẢI TIẾN TRÊN CAMERA CỦA IPHONE 16
-
CHIP A18 TRÊN CÁC DÒNG IPHONE 16 SẮP RA MẮT
-
THÔNG TIN VỀ IPHONE 16 SẮP RA MẮT
-
MẸO IPHONE 04. NGHE MỘT TRANG WEB TRONG SAFARI
-
iOS18 SẼ CHO PHÉP THAY THẾ LINH KIỆN TỪ BÊN THỨ 3
-
MẸO IPHONE 03. TỰ ĐỘNG XÓA MÃ OTP
-
MẸO IPHONE 02. GÕ ÍT HƠN BẰNG CÁCH THAY THẾ VĂN BẢN
-
MẸO IPHONE 01. XÁC ĐỊNH VỊ TRÍ IPHONE BỊ TẮT
-
KẾT NỐI MÀN HÌNH DELTA VÀ PLC S7 200 – CONNECTING DELTA SCREEN AND PLC S7 200
-
STEP 7 MicroWIN Smart V2.7 — [Download]
-
LỆNH SINA_SPEED TRONG S7 200 SMART